科技圈看似喧嚣纷杂,实则环环相扣。
想从中抽出一条观察具身智能行业走向的线索,“投资阵容”或许是最显而易见的那一根,投资阵容,往往比发布会上的PPT更能说清一家公司的底牌,也更能折射出整个行业的暗流涌动。
跨界玩家们纷纷高调入局,但技术路线尚未收敛、产品标准仍在混沌之中,一个最朴素的判断方法是:去看他们的身后站着谁。
今天,“小米系”具身大脑企业小雨智造宣布完成数亿元B轮融资。
本轮融资由华业天成领投,招银国际、茅台基金、贵州省科创天使基金共同跟投,老股东滴滴和小米联合创始人黎万强追加投资。
同时,融资将用于加大具身大模型投入,持续布局工业场景,与全球领先的供应链企业展开战略合作加速量产,以“一脑多形”为目标,打造最落地的全栈具身智能平台。
资料显示,小雨智造由小米曾经的核心创始团队成员,于2023年创立,也是小米投资的首家大模型公司,其核心产品是XiaoyuBrain通用机器人大脑。
成立至今,小雨智造共完成了5轮融资,累计金额数亿元,投资阵容更是集结了小米、滴滴等产业巨头,讯飞创投这样的垂直领域基金,以及北京智源人工智能研究院、北京信息产业发展基金等国家级科研与产业力量。
天眼查显示,早在2月26日,小雨智造便已完成此轮融资。选择在今天官宣,其时机拿捏颇为微妙,意在承接昨日小米在人形机器人领域最新进展所引发的市场关注与舆论热度。
3月2日,雷军公开表示,“小米机器人已经开始在汽车工厂实习”,并预计,未来5年会有大批量人形机器人进入小米工厂干活。
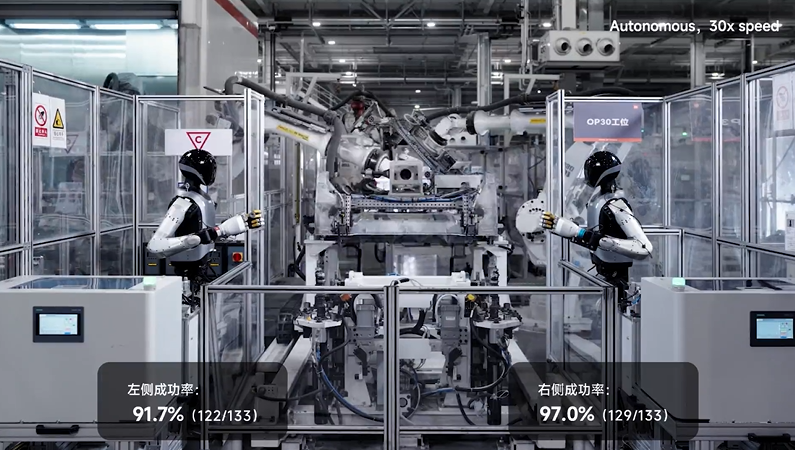
同一天,小米发布一条4分钟演示视频,展示了两台人形机器人在自攻螺母上件工站长达3小时的连续自主运行中,两台人形机器人共完成133次工序。
这是第一次有厂商主动披露人形机器人在真实工况下的实测数据,据显示,左侧机器人成功率为91.7%,右侧则达到97%;双侧同时安装成功率为90.2%,同时满足了最快76秒的产线生产节拍要求。
小米介绍了这一任务的工序,人形机器人连续从自动送钉设备中精准抓取自攻螺母,并放置在自攻拧紧的定位工装上,配合滑台输送和自攻工位的自动定位锁定,实现汽车一体化压铸后地板零件自攻螺母的自动化自攻拧紧作业。
其中,难度最高的环节集中在自攻螺母的安装过程,需要确保其与定位销轴的精确对准和可靠贴合。而自攻螺母内侧的花键结构,每次抓取不固定的手内姿态,以及定位销轴上磁吸力带来的拉扯影响,都大幅增加了装配难度。
小米指出,在“生产节拍”与“合格率”这两个工厂最核心的指标上,人形机器人仍面临巨大挑战。不过,在技术路线尚未收敛的当下,业内尚无一家厂商敢断言自家的实战数据即是“参考答案”或“标准答案”。
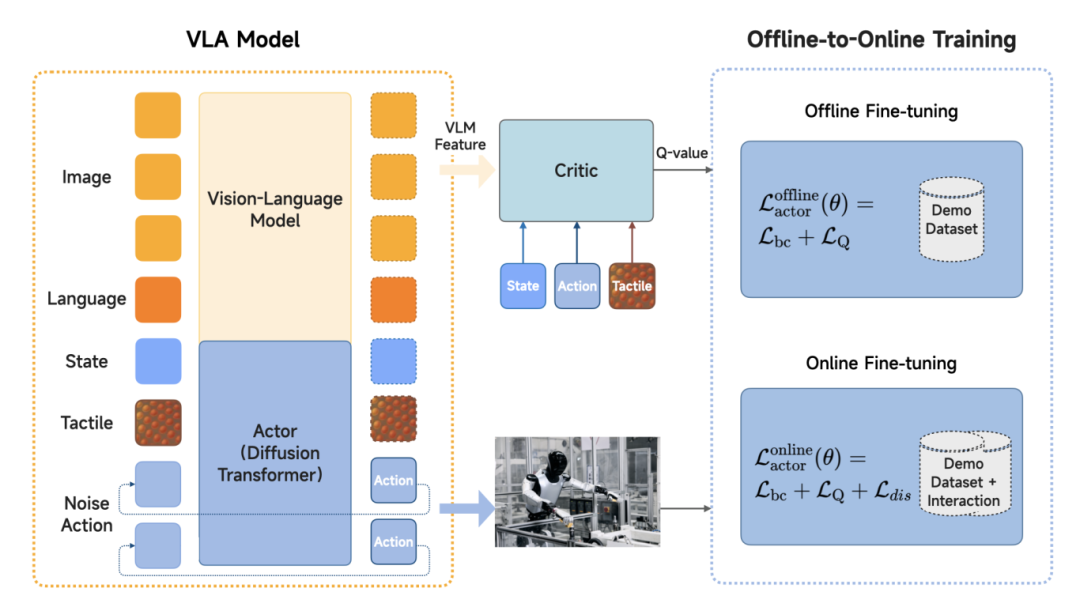
根据小米披露,这两台人形机器人搭载模型框架由2个部分组成,左侧是2月12日,小米对外发布开源的VLA 模型 Xiaomi-Robotics-0,其采用了主流的 Mixture-of-Transformers (MoT) 架构;右侧是一个离线-在线联合训练框架。
模型框架与训练流程
一方面,Xiaomi-Robotics-0采用了多模态 VLM 大模型作为底座。它负责理解人类的模糊指令,并从高清视觉输入中捕捉空间关系。
在这一板块中,首先接收图像与语言指令,输出对应的特征信息。随后,该特征会与当前状态、动作、触觉等多模态参数相结合,共同计算出Q函数,最终为离线预热提供关键依据。
针对多任务训练中常见的任务失衡问题,小米团队采用共享智能体+任务专属评论家架构:主智能体与精调智能体在所有任务间共享,保证多任务策略统一;每个任务配备独立的Q函数评论家,实现更精准的价值评估。
另一方面,在动作执行小脑(Action Expert)中,小米为了生成高频、平滑的动作,在大模型中嵌入了多层的 Diffusion Transformer (DiT)。
最终,它不直接输出单一动作,而是生成一个“动作块”,并通过机器人传输至在线微调架构中。
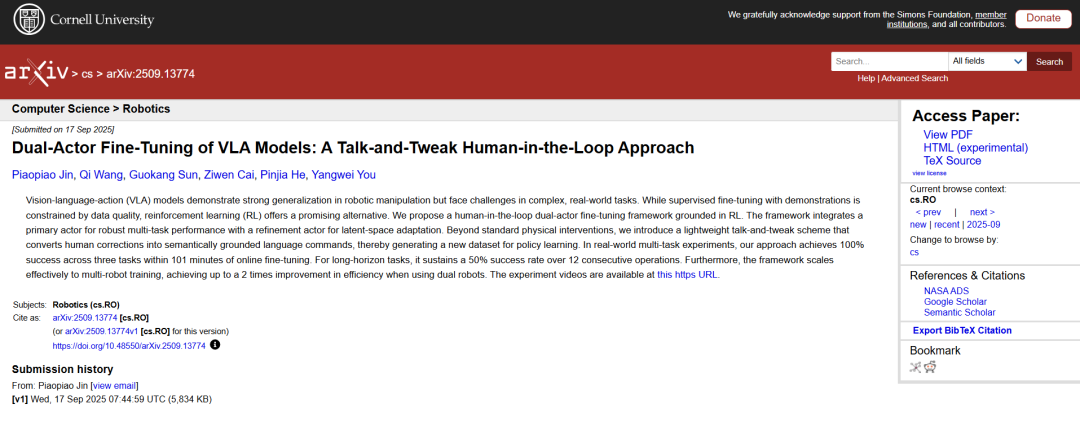
如果对这个上图中的离线-在线联合微调框架感到陌生,可以了解一下,2025年9月中旬,小米机器人技术有限公司就与香港城市大学联合提出双智能体微调方案,HIL-DAFT人机环双智能体微调框架。
公开资料显示,该架构采用主从双智能体协同工作:主智能体基于去噪扩散机制,保证了多任务动作的稳定输出与泛化能力;精调智能体则在潜空间内通过调整噪声分布,在不影响主策略的前提下实现符合语言指令的精细化动作修正,共同保障机器人在复杂任务中的优异表现。
两个智能体的分工协作逻辑一目了然:平时,主智能体独当一面,保证多任务基础性能的稳定输出;一旦接收到“向右移动”这样的语言指令,精调智能体便会迅速介入,通过调整潜噪声分布来优化主智能体的动作。
一方面规避了直接修改策略参数带来的训练风险,另一方面让动作调整变得透明可解释,用户只需下达简单的语言指令,就能精准驾驭机器人的每一个修正动作。
针对多任务训练中常见的任务失衡问题,小米团队采用共享智能体+任务专属评论家架构:主智能体与精调智能体在所有任务间共享,保证多任务策略统一;每个任务配备独立的Q函数评论家,实现更精准的价值评估。
小米团队表示,基于HIL-DAFT人机环双智能体微调框架,仅需101分钟在线微调,即可让机器人完成螺栓立放、拾取、装配三项精密任务,成功率达100%;在12步连续长程任务中,完成率仍可保持50%,并能通过双机器人并行训练将效率提升两倍。
其核心突破在于将人类物理干预转化为语义化语言指令,让VLA模型微调不再依赖演示数据质量,同时解决了传统强化学习样本效率低、多任务训练不稳定的行业痛点。
说实话,仅凭一个4分钟视频,没人知道小米对探索具身智能已经到了什么程度,从公开信息来看,其在2025年全年并未披露该领域的突破性进展或实质性创新动作。
但种种迹象表明,小米对具身智能行业的暗中布局,其实从未止步。
在人事调动方面,去年11月,前特斯拉Optimus灵巧手团队成员卢泽宇加入小米机器人团队,负责灵巧手;“前 DeepSeek 核心研究员”、95 后“天才少女”罗福莉,加入小米,负责 MiMo 团队,主攻空间智能方向。
在模型方面,今年2月5日,小米机器人团队公布了在具身智能领域的阶段性研究成果TacRefineNet ,一个只依靠触觉、无需视觉、无需物体三维模型,就能实现毫米级位姿微调的通用框架。
去年11月,小米开源了首个跨域具身大模型 MiMo-Embodied,这是一款统一的VLM,将自动驾驶和具身人工智能的任务融合到一个单一模型中。
在投资取向方面,2025年,小米集团分别投资了柔性织物触觉传感器企业尧乐科技、视触觉传感器企业纬钛机器人、本体企业萝博派对、灵巧手企业曦诺未来;
同年,雷军名下的投资机构顺为资本分别投资了Ai陪伴机器人企业贝陪科技、仿生机器人企业首形科技、本体企业深朴智能和Ouropia。
有意思的是,小米集团投资的传感器企业和灵巧手企业,和招揽卢泽宇进入灵巧手团队,这一连串动作似乎在隐隐暗示着,小米对于灵巧操作的野心。
甚至在设立的招聘岗位方面,小米单独设立了“多自由度灵巧手控制算法开发岗”。
也就是说,除了不断发布和开源的具身大模型,说不准下一个“炸场子”的具身智能产品会是灵巧手,或是新一代CyberOne?
虽然小米对于具身智能的考量并不明朗,但是不少小米高管却因为看好具身智能,选择离职创业,有意思的是,他们分别选择了不同的领域。
例如文章开头提到的小雨智造,其
.portal{background: #f8f8f8; padding: 10px; border-radius: 5px;line-height: 24px;}
1、在本站里发表的文章仅代表作者本人的观点,版权归原作者所有,与本网站立场无关。
2、本站内容都不保证其准确性,有效性,时间性。阅读本站内容因误导等因素而造成的损失本站不承担连带责任。
3、当政府机关依照法定程序要求披露信息时,本站均得免责。
4、若因线路及非本站所能控制范围的故障导致暂停服务期间造成的一切不便与损失,本站不负任何责任。
5、注册会员通过任何手段和方法针对本站进行破坏,我们有权对其行为作出处理。并保留进步追究其责任的权利。
6、本站文章来自第三方平台,如涉及到您的权益请您告知我们或者联系2444830518@qq.com我们第一时间删除。















 京公网安备 469023020002510号 |
京公网安备 469023020002510号 |