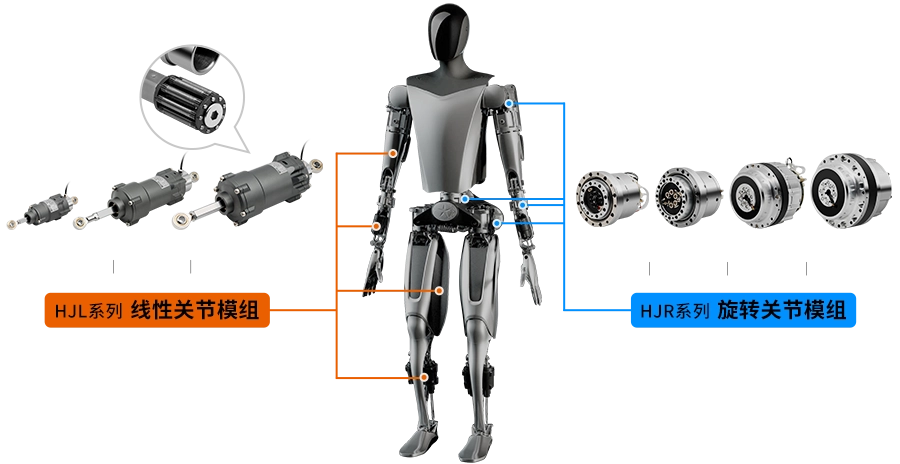
在不同类型的机器人中,由于运动的复杂性,人形机器人具有多种类型的关节,包括上肢关节(腕、肘、肩)、腰部关节、下肢关节(踝、膝、髋)以及手部关节等。根据机器人中不同关节运动的输出形式,可将其分为旋转关节和直线关节。有些机器人关节只能通过特定类型的驱动器来驱动,如腰部关节只能由旋转驱动器驱动;而其他关节则可以通过不同类型的驱动器或多种驱动器协同工作来实现运动,如肘部关节既可以由旋转驱动器驱动,也可以由旋转驱动器与直线驱动器组合驱动。 来源:泰科机器人
人形机器人关节的发展始终围绕核心目标:在有限空间内提升集成度,满足轻量化设计需求,降低系统整体质量;在体积与质量约束下提升载荷输出能力、降低制造成本、优化能耗效率。
旋转关节是机械结构中最常见的关节类型,主要用于连接两个部件并实现二者的相对旋转,其核心组成部分包括驱动器、回转轴和轴承。在驱动方式上,旋转关节可由电动机直接驱动以产生旋转运动,但为了获取更大的转矩,通常需要搭配减速装置,例如谐波减速器、行星减速器等。同时,旋转关节一般通过轴承进行支撑,以此减少部件间的摩擦,确保旋转过程平稳顺畅。此外,其动力传递可通过连杆机构、齿轮机构、万向节,以及带、链、绳传动等多种方式实现。
谐波一体化关节模组 来源:意优科技
近年来,随着人形机器人研究热潮的兴起和政策支持的持续加码,电驱动式旋转关节及新型结构关节的技术要求显著提升。这一发展趋势不仅对关节的控制精度提出了更高标准,同时也对关节的轻量化设计带来了新的挑战,促使关节结构设计呈现出从独立机械构件向多功能一体化集成的演进趋势。这种一体化关节通过将驱动、传动、传感等核心功能模块有机整合,可实现结构紧凑化与功能集成化的统一。
目前,旋转关节在人形机器人中应用广泛,特斯拉Optimus、波士顿动力Atlas、本田Asimo等知名机器人,其肩部、腕部、腰部等均采用旋转关节,通过部件集成提升设计紧凑性和效率。但旋转关节在部分场景存在冗余度大、运动范围有限、负载能力不足等问题,此时直线关节可发挥更优性能。
直线关节是工程与机械设计中常用的运动关节,可实现单方向的直线运动。液压缸、气缸、直线电机、电动缸等一体化机电作动器,均可搭配齿轮、行星滚柱丝杠、滚珠丝杠等传动机构,输出稳定的直线位移。
与旋转关节相比,直线关节凭借紧凑的直动结构,能有效节省安装空间,简化机器人整体构型,在人形机器人局部部位应用中更具优势。该结构可直接降低末端执行器的负载质量,同时使重心上移并靠近躯干,显著提升设备运动稳定性与响应速度。
传统直线输出机构主要采用两种实现方式:其一是通过气缸、液压缸和活塞等执行元件直接产生直线运动;其二是借助齿轮齿条、丝杠与螺母等传动元件将旋转运动转换为直线位移。然而,这些传统方案多依赖外部传感器检测位置,普遍存在精度不足的缺陷,难以满足现代机器人关节对高精度定位和快速响应的严苛要求。相比之下,一体化直线伺服关节通过高度集成化设计,不仅实现了机械结构的大幅简化,更在系统响应速度和控制精度方面取得了显著提升。
人形直线关节模组来源:意优科技
综合来说,旋转关节和直线关节各有优势,分别适用于不同场景,二者共同支撑人形机器人的灵活运动。人形机器人关节的驱动方式主要包括电驱动、液压驱动和气动驱动,不同驱动方式的应用的将进一步影响关节性能,推动人形机器人关节技术向更高效、更精密、更轻量化的方向发展。
来源:各企业官网
|
















 京公网安备 469023020002510号 |
京公网安备 469023020002510号 |