对于车企而言,谁能在具身智能的深水区率先突破技术瓶颈,谁就能掌握通往未来世界的钥匙。
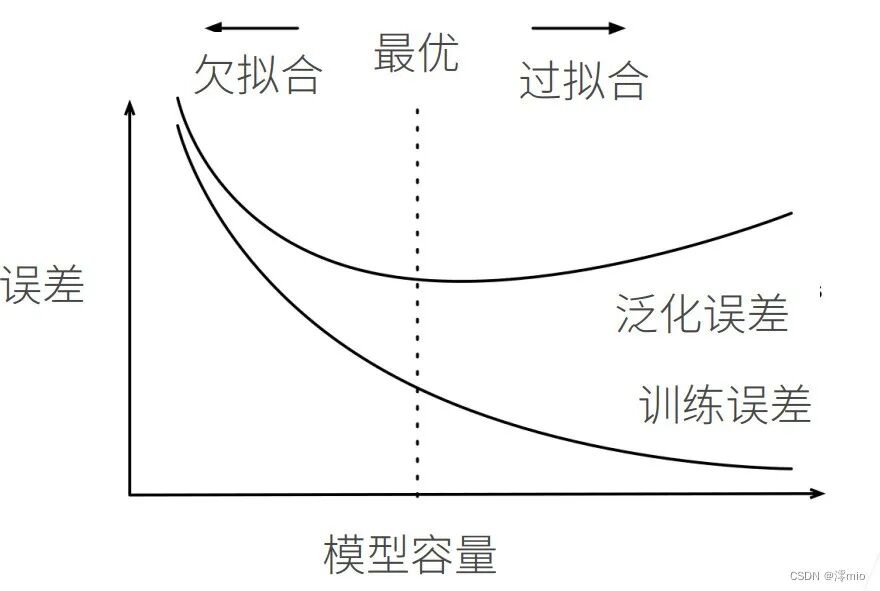
人形机器人已然成为当下科技界最耀眼的“顶流”。春晚舞台上各家人形机器人灵动惊艳的集体亮相引发全民惊叹与文化破圈;两会上,众多代表委员密集提交相关议案,将其上升为国家战略层面的关注焦点。从大众视野的“新宠”到国家发展的“重点”,人形机器人的热度正在持续升温。人形机器人的热度也引得各路玩家纷纷下场。在造车赛道没能分出胜负的车企们,凭借智能驾驶技术积淀、成熟供应链体系与制造场景优势,纷纷布局人形机器人领域,成为这一赛道的主力军。车企纷纷跨界入局人形机器人赛道,其背后的战略意图与发展路径究竟何在?人形机器人的规模化落地,又将对汽车行业乃至全领域的维保人员、产业工人带来哪些颠覆性影响与职业变革?马斯克特斯拉人形机器人Optimus 3将在今年夏天进入生产阶段;小鹏汽车新一代IRON机器人将在年底启动量产;比亚迪“尧舜禹”项目计划2026年完成2万台内部自用,2028年大规模落地;现代汽车计划2028年将波士顿动力的新一代Atlas人形机器人部署电动汽车智造工厂……随着全球人口老龄化进程不断加速,人类对于机器人技术的需求正从科幻走向刚需。以中国为例,老龄化已成为社会发展的重大挑战。根据国家统计局数据,中国65岁及以上人口占比已从2018年的11.9%持续攀升至2024年的15.6%,预计到2035年将突破30%。劳动力成本持续攀升,人力缺口日益凸显。在这一背景下,机器人已不再是未来的选项,而是应对社会变迁、填补服务空白的迫切需求。美国银行(Bank of America)全球研究部在近日发布的一份深度报告中指出,人形机器人市场正处于爆发前夜。据其预测,未来五年内该行业的出货量复合年增长率(CAGR)将高达86%,其扩张速度甚至将超越早期电动汽车市场的爆发曲线。到2060年,全球人形机器人的总保有量预计将达到30亿台。而在人形机器人这一未来产业上,车企们有着天然的优势。在硬件层面,人形机器人的关键部件如传感器、芯片、电机、电池等,恰恰是车企深耕多年、已形成规模化与成本优势的领域;在感知层面,智能网联汽车的自动驾驶和人形机器人都依赖于计算机视觉、多传感器融合等核心技术;在决策与规划层面,车企在自动驾驶领域积累的海量数据、训练成熟的AI大模型以及复杂的算法架构,都可以无缝迁移并赋能于人形机器人的研发。例如,特斯拉将其FSD(完全自动驾驶)系统中的神经网络规划技术迁移至Optimus,使其能够自主导航和避障。这种软硬件双链条的深度复用,极大地缩短了研发周期、降低了试错成本,成为车企入场人形机器人赛道的天然优势。机器人取代人类是科幻小说、电影经常出现的场景。但如今,这样的场面不再是仅存在于科幻电影中的想象了,人形机器人已经实实在在地走进了汽车工厂,开始承担具体的生产任务。小米的自研人形机器人已在北京亦庄的小米汽车工厂正式“上岗实习”。在压铸车间的自攻螺母安装工位上,它成功完成了连续3小时的无人干预自主作业。小鹏汽车的进展同样迅速。其人形机器人IRON不仅在自有工厂的“P+生产线”上承担分拣、搬运、质检等工序,还走出车间,在门店中担任导览和导购员,展现了其跨场景的应用潜力。在美国斯帕坦堡工厂,宝马与Figure AI合作部署的Figure 02机器人,在长达十个月的试运行中表现卓越。它主要负责为焊接工序精准取放金属板,这项工作要求极高的速度与精度。最终,Figure 02累计协助生产了超过3万辆宝马X3,搬运了超过9万个部件。此外,宝马还在其德国莱比锡工厂启动了与瑞典Hexagon公司AEON机器人的试点项目,用于高压电池装配等关键环节。人形机器人的演进速度令人惊叹。随着人工智能大模型、具身智能算法以及硬件技术的发展,“黑灯工厂”——即全流程无人化、关灯生产的智能制造典范,似乎已触手可及。人们不禁畅想:人形机器人全面取代人类工人、实现完全自动化的未来,或许真的指日可待。然而,在这股热潮背后,我们必须清醒地认识到:人形机器人真正走入工厂、构建完全无人的“黑灯工厂”,仍面临诸多尚未攻克的挑战。人形机器人为什么要做成人形?核心在于希望机器人能够以同一种形态胜任多样化的任务。这种通用型机器人的构建与制造成本相对较低,效率更高。在此背景下,若要探讨何种形态最具通用性,一个自然的答案是采用人形设计。因为当前各行业的场景布置和工具操控,都是基于人类形态而设计的。不过纵观当前车企的布局实践,我们不难发现,现阶段人形机器人在工业制造领域的角色仍显单一,它们主要承担拧螺丝、搬运零件、物料分拣等结构化程度高、重复性强且技术门槛较低的基础工序。这表明,尽管人形机器人已正式“上岗”,想要完全取代人类工人,还有很长的路要走。首先,当前人形机器人在数据收集与学习层面仍存在显著盲区,触觉数据的缺失尤为致命。目前人形机器人的感知体系高度依赖视觉数据,其背后是大模型、深度学习与海量图像标注技术的支撑。然而,这种对视觉的单一依赖存在显著的物理局限:人类灵巧操作中所必需的关键物理属性——包括力、材质、顺应性以及内部张力是纯视觉信号根本无法捕捉的盲点。人类手部的灵巧操作广泛依赖于触觉与力觉的实时反馈与全身感知系统的协同。诚然人形机器人装备了诸多传感器,然而触觉的本质远超简单的“局部压力传感”。它是一个高度动态、时间依赖且与运动紧密耦合的复杂感知系统,提供关于力、滑动、材质、形变等丰富信息。更为关键的是,人类的骨骼肌系统本身即是精密的感知器官。通过肌梭(检测肌肉长度与拉伸速率)和高尔基腱器官(感知肌肉张力),人体能实时监测自身施加或承受的力。这种机制使得人类在执行动作时,能够将视觉估计与本体触觉反馈无缝融合,从而实现对姿态调整和物体操作的精准控制。相比之下,现有机器人尚缺乏这种深度的多模态感知融合能力。其次是人形机器人的过拟合(Overfitting)问题。所谓过拟合,指模型在训练集上表现极佳,但在未见数据上的性能显著下降的现象。这一问题的根源在于当前训练数据的单一性。目前,人形机器人的预训练严重依赖模拟环境和合成数据。在这一过程中,模型不仅学习了数据的真实规律,还“记住”了训练数据中的噪声与偶然特征,导致泛化能力下降。导致人形机器人在面对真实环境、复杂环境时可靠性下降。高盛的一份调研指出了这一问题:人形机器人在模拟环境中80%—90%的准确率,在真实场景中往往跌至50%以下。这种巨大的落差表明,模型并未真正学会通用的操作逻辑,而是过拟合了模拟环境的特定参数,致使机器人在面对真实世界中复杂多变的非结构化环境时,可靠性大幅降低。除此之外,人形机器人对维保人员也提出了前所未有的挑战,主要体现在故障诊断复杂度的剧增。与传统工业机器人不同,人形机器人是机械、电子、软件算法与具身智能的深度融合体,其故障往往具有“多维度耦合”特征:一个动作异常可能源于机械关节磨损、传感器噪声、控制算法过拟合。维保人员不再只需更换零件,他们必须具备跨学科的系统工程思维,能够利用数字工具在虚拟环境中复现故障,从海量日志中剥离出真正的致因,这要求维保人员对自身的技能进行重构。车企跨界造“人”,不仅是技术复用的自然结果,更是应对未来劳动力结构变化、重塑生产力的战略举措。然而,从“能用”到“好用”,从实验室走向真实世界,人形机器人仍需在触觉感知、泛化能力及系统稳定性上跨越巨大的鸿沟。人形机器人带来的变革不仅将重新定义智能制造的边界,更将对人类劳动者的技能体系提出前所未有的重构要求。未来的工厂,不再是人与机器的简单替代关系,而是人机协作、共同进化的新生态。对于车企而言,谁能在具身智能的深水区率先突破技术瓶颈,谁就能掌握通往未来世界的钥匙。造车的尽头是机器人,而机器人的终点,将是人类自由创造力的无限延伸。
|
1、在本站里发表的文章仅代表作者本人的观点,版权归原作者所有,与本网站立场无关。
2、本站内容都不保证其准确性,有效性,时间性。阅读本站内容因误导等因素而造成的损失本站不承担连带责任。
3、当政府机关依照法定程序要求披露信息时,本站均得免责。
4、若因线路及非本站所能控制范围的故障导致暂停服务期间造成的一切不便与损失,本站不负任何责任。
5、注册会员通过任何手段和方法针对本站进行破坏,我们有权对其行为作出处理。并保留进步追究其责任的权利。
6、本站文章来自第三方平台,如涉及到您的权益请您告知我们或者联系2444830518@qq.com我们第一时间删除。


















 京公网安备 469023020002510号 |
京公网安备 469023020002510号 |