年后的具身智能企业,如果没有十亿级融资,似乎都不太好意思出来露面。
近日,具身智能公司灵初智能宣布完成天使轮及Pre-A轮融资,总融资规模约20亿元人民币。本轮融资吸引了多家国家级资本、产业龙头与市场化基金共同参与,也让灵初成为当前国内具身智能赛道融资体量较高的创业公司之一。
其中,天使轮投资方包括国开金融、国中资本、央视融媒体产业投资基金等国家级资本,同时获得长飞光纤旗下基金等产业资本支持,以及元生创投、珠海科技产业集团、钧山投资、燕缘创投、大米资本、沃赋资本、彬复资本、泰合资本等多家机构参与投资。
在随后完成的Pre-A轮融资中,由上海国资徐汇资本等领投,某头部国资平台、梁溪科创产业二期母基金(博华资本管理)、锡创投等地方国资平台,以及普丰资本、钛铭资本等市场化基金共同跟投,多家老股东继续超额加码。华兴资本担任公司长期财务顾问。
从投资阵容来看,这笔融资同时汇聚了国家级资本、地方产业基金以及光纤产业龙头。灵初智能方面表示,本轮融资将主要用于两个方向:一是推进机器人在物流场景中的规模化落地;二是建设大规模真实世界数据采集体系,以支撑具身智能大模型的持续训练与迭代。
灵初智能Psi V1
今年以来,行业开始达成一个模糊的共识:数据获取能力正在决定模型进展的上限,也决定商业化推进的速度。谁更快、更高性价比地拿到真实数据,谁就更可能先把模型推到可用、再把项目推到落地。
在这样的背景下,灵初智能选择了一条颇为鲜明的技术路线:以人类真实操作数据为核心来源,通过可穿戴设备采集日常操作行为,并构建大规模数据网络,从而为具身智能模型提供最稀缺的训练资源。
在本轮融资之前,灵初智能已经获得资本市场的持续关注。
早在2024年11月,公司成立仅两个月,便完成了由高瓴创投、蓝驰创投领投的融资,具体金额并未披露。彼时灵初智能对外表示,资金将主要用于推进基于强化学习的机器人技能训练、场景化数据生成与采集,以及端到端具身智能解决方案的研发与落地,目标是打造具备通用操作能力的灵巧操作智能体。
对于一家成立时间不长的创业公司而言,资本如此密集地押注,核心原因仍然在于团队背景。
灵初智能创始人兼CEO王启斌博士在手机、智能音箱和机器人等硬件领域拥有近20年的产业经验。他曾多次主导产品从定义、研发、量产到全球化销售的完整周期,在消费电子与智能硬件行业积累了丰富的商业化经验,被业内视为深谙产品落地路径的产业老兵。

联合创始人兼工程负责人柴晓杰博士则拥有15年机器人与自动驾驶领域经验,长期从事算法、仿真与工程系统研发,在自动驾驶L4级产品的数据闭环与工程化落地方面拥有成熟经验,是团队中负责技术体系工程化的重要核心人物。
联合创始人兼工程负责人柴晓杰博士
在算法研究层面,灵初智能同样引入了多位强化学习领域的研究者。
公司首席科学家杨耀东博士毕业于伦敦大学学院(UCL),这一机构也被视为现代深度强化学习研究的重要发源地之一。杨耀东长期从事强化学习与多智能体系统研究,曾带领华人团队在 Nature Machine Intelligence 发表多体强化学习算法研究成果,并获得NeurIPS 2022具身灵巧操作竞赛冠军。
在创立初期,灵初智能便与北京大学共同成立“北大—灵初智能具身灵巧操作联合实验室”,由杨耀东担任联合实验室项目负责人,开展强化学习与机器人操作相关研究。
灵初智能的技术团队中,也不乏年轻研究者。
公司联合创始人陈源培是一名出生于2000年后的机器人研究者,曾作为斯坦福大学访问学者,师从Karen Liu与李飞飞教授。在此前研究中,他曾实现利用强化学习在真实世界环境中同时控制双臂与灵巧手完成多技能操作,这一成果在机器人强化学习领域引起广泛关注。
与此同时,来自上海交通大学人工智能学院的温颖副教授也加入团队,负责强化学习研究方向。温颖团队此前提出多模态决策模型DB1,在多个任务上实现了对DeepMind通用决策模型Gato 的性能超越,并构建了包含百余个真实任务场景的数据体系,为强化学习算法提供了更接近现实世界的训练环境。

除了团队背景外,灵初智能与智元机器人的合作关系同样受到关注。
王启斌曾表示,智元是灵初智能的天使轮投资方之一,并在硬件资源方面给予了支持。
2026年2月,智元机器人旗下具身智能数据平台觅蜂科技完成数亿元融资,而灵初智能也出现在其投资方名单中。
这一系列动作背后,其实指向同一个方向:数据基础设施正在成为具身智能产业链中的关键环节。
如果说具身智能的2025年还是模型与Demo的竞赛,那么下半场很可能会变成数据体系与真实场景的竞争。
从这个角度来看,灵初智能的团队背景与产业合作关系,恰好围绕着同一个问题展开:如何更快获得真实数据,并把这些数据转化为机器人的能力。
这也是为什么,成立时间并不长的灵初智能,会持续获得资本重注。
在具身智能这条仍然充满未知的赛道上,资本押注一家机器人公司,本质上是在押注一种技术判断。
在灵初智能看来,这个判断正在逐渐清晰:真正决定具身智能进展速度的,并不仅仅是模型架构,而是数据能否持续规模化产生。
灵初智能创始人兼CEO王启斌在采访中表示,行业对数据的重要性已经形成共识,但真正困难的地方在于如何建立能够长期运转的数据生产体系。
“数据是大家一个共识,但更底层的问题是,现在没有一个好的技术和商业结合,让数据能够大规模、低成本地回来。”
灵初智能联合创始人陈源培也直言:“在数据量不够的时候,调整模型架构带来的成功率变化其实没有太大价值。现阶段应该优先扩大数据规模,再讨论模型架构。100小时数据里最优的架构,在1万、100万小时数据下未必适用。”
尽管行业已经喊了将近一年“数据为王”,但目前具身智能的数据积累,与大语言模型相比仍然微不足道。当前行业主流数据量普遍停留在万小时级别,而真正具备强泛化能力的具身模型,很可能需要百万小时以上的数据规模。
“现在大家积累的数据量基本都在万小时级别,包括PI这样的龙头企业,也只是万小时出头。Generalist AI说有20多万小时,但大部分公司还是万小时级别。我们判断,至少要到百万小时以上,才可能出现类似ChatGPT那样具有强泛化能力的具身模型,现在整个行业其实还处于非常早期阶段。”陈源培说。
问题在于,机器人并不像大语言模型或自动驾驶那样拥有天然的数据来源。大语言模型可以直接使用互联网文本,自动驾驶则依赖车辆在道路上持续产生的数据。但机器人世界中,并不存在类似的“天然数据矿”。
长期以来,行业主要依赖四种方式获取训练数据:互联网视频数据、仿真环境生成、机器人遥操作采集,以及近半年逐渐流行的UMI路线。
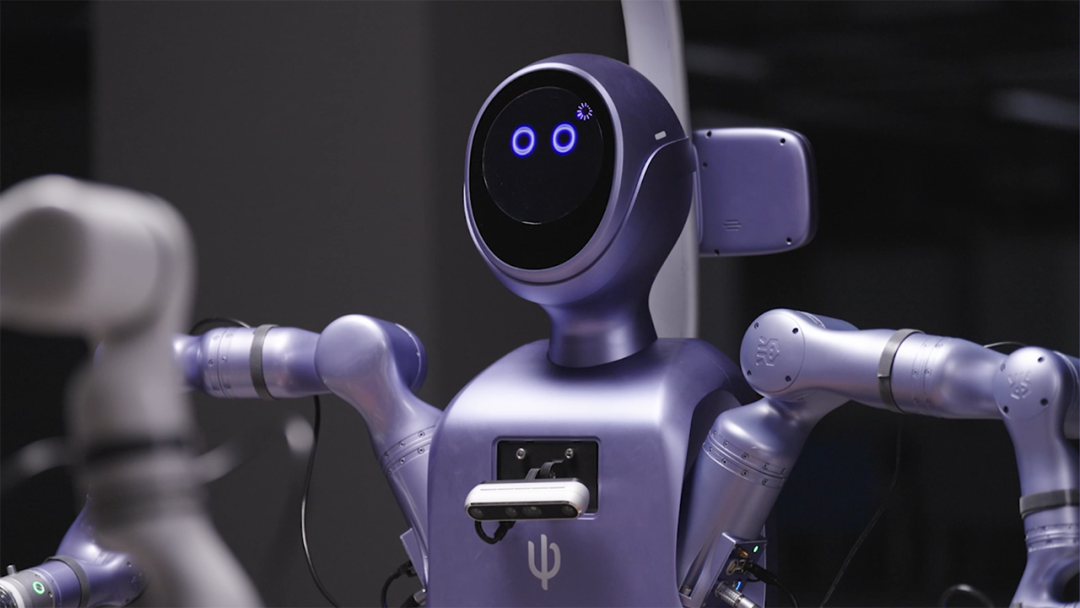
灵初智能开发的遥操手套
但这些方式都很难生产出既大规模又高质量的数据:互联网视频虽然规模庞大,但缺乏精确的动作、力觉与接触信息,很难直接用于机器人操作学习;仿真环境可以生成大量样本,但柔性物体、复杂接触以及环境变化仍难以真实建模,Sim-to-Real 的鸿沟始终存在。
机器人遥操作能够采集高质量数据,但成本极高、扩展困难;而近期流行的UMI路线,本质上仍然依赖专门设备和操作人员进行数据采集,在陈源培看来,这同样难以真正解决规模问题。
“你想,一个物流工人不可能拿着两个夹爪去工作,一个收银员也不可能拿着夹爪去收银。如果数据采集必须雇人专门去做,那成本永远降不下来。”陈源培说,“这种方式很难扩展到真正的规模。”
王启斌在采访中进一步指出,机器人数据采集的成本通常来自三个方面:硬件设备、人员投入以及数据存储。传统遥操作方案往往需要整机设备和专门操作人员,整体成本始终居高不下。
“如果整体算下来,我们这套方案的数据采集成本大概可以做到目前数采方案的十分之一左右。”
他表示,在团队规划中,这套系统未来还会推出更加轻量化的便携版本,数采设备就能够被携带进入真实的工作和生活环境,甚至形成类似众包的数据采集网络,从而进一步扩大数据规模。
不过,在王启斌看来,成本下降只能解决数据规模问题,并不能保证模型一定能够训练出有效能力。“数据采集只是第一步,更重要的是如何把这些大规模、高信噪比的数据训练进模型,真正转化为机器人的能力。”
也正是在这样的判断下,灵初智能选择了一条不同的路线:Human-Centric Data(以人为中心的数据)。
在陈源培看来,机器人需要学习的操作,本质上都来自人类日常生活与工作的行为。如果能够在不影响正常作业的前提下记录这些动作,就有机会建立起远超传统机器人数据集规模的数据来源。
“我们判断未来具身智能的数据,大概率来自人类日常生活中的操作行为,所以我们做了一套设备,把这些数据采下来。”
2025年11月,灵初智能发布了数据采集系统Psi-SynEngine。这套系统由灵初智能全栈自研,核心是一套外骨骼触觉手套与完整的数据管线,可以在真实环境中同步采集视觉、语言、触觉和动作等多模态信息,并将这些数据转化为机器人训练所需要的数据结构。
与UMI或传统遥操作采集不同,Psi-SynEngine的目标不是建立一个专门的数据采集场,而是让数据采集直接嵌入真实工作场景。物流分拣员、工厂操作员、商超工作人员甚至家庭服务人员,只需要佩戴手套,就可以在不影响日常工作的情况下记录操作过程。
在陈源培看来,这正是Human-Centric路线与UMI的根本区别。UMI本质上仍然是一种专门的数据采集设备,需要人去模仿机器人的动作、组织专门的采集任务;而Human-Centric数据则来自真实世界的自然操作,让人用最舒适的方式完成工作,再把这些行为记录下来。
“如果数据采集可以嵌入到人们原本的工作流程,比如物流工人戴着手套工作,那么数据就会在真实场景中不断产生。最理想的情况是让用户戴着手套正常生活和工作,我们再把这些数据采回来,并给他们一些报酬。这样数据采集的效率和成本是最高的。”
Human-Centric的另一层含义,是以人类动作为中心构建数据体系。这也是为什么灵初智能选择用五指手套,而不是夹爪设备作为采集工具。
在陈源培看来,机器人硬件会不断更新迭代,夹爪设备可能几年就发生变化,一旦硬件结构改变,原有数据就可能失效。但人手的结构是稳定的,以人类动作为中心采集数据,可以最大程度避免数据作废的风险。
行业中也有声音认为,大部分场景其实只需要夹爪就可以解决,没有必要使用五指灵巧手。但陈源培认为,这是一个伪命题。
“如果你真正进入客户场景,就会发现这个逻辑根本行不通。假设一个仓库有100种物体,你只能处理80种,那剩下20种怎么办?难道让客户不要这些订单吗?这在真实场景里是不可能的。”
“很多人觉得80%就够,是因为他们只做demo。你能抓80个物体,那剩下20个不展示就好了。但到了真实场景,哪怕有一个SKU抓不了,这个场景就算失败。”
灵初智能机器人在分拣
因此,在




















 京公网安备 469023020002510号 |
京公网安备 469023020002510号 |